| Simmetrie nell'ambito di un progetto europeo |
|
|||||||||||
| Home | Premessa | Curriculum | Approfondimenti | Guida | Piani di lezione | Bibliografia | |||||
| ISOMETRIE | |||||||||||
| Le principali isometrie
Ci sono infinite isometrie; dĺaltra parte tutte queste si possono ricondurre
a quattro tipi fondamentali:
Simmetrie assiali. Fissata una retta a si dice simmetria assiale di asse a la corrispondenza che associa ad ogni punto P del piano non appartenente ad a il punto Pĺ situato sulla retta per P perpendicolare ad a, nel semipiano opposto, rispetto ad a, a quello contenente P e alla stessa distanza di P da S. Se P appartiene ad a allora Pĺ coincide con P. 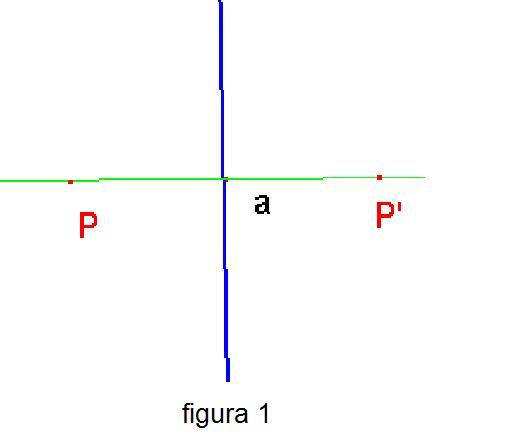 Nella simmetria assiale di asse a il punto Pĺ Ŕ detto ôsimmetricoö di P rispetto ad a e pi¨ in generale la figura F', trasformata della figura F, Ŕ detta ôsimmetricaö di F rispetto ad a. 
La seconda figura mostra due figure simmetriche nella simmetria di asse a. Si dimostra facilmente che ogni simmetria assiale Ŕ una isometria. Una proprietÓ comune a tutte le isometrie Ŕ quella di trasformare rette in rette, cioŔ se A,B,C sono tre punti distinti allineati anche i loro corrispondenti Aĺ,Bĺ,Cĺ sono distinti e allineati. Inoltre, per una simmetria assiale di asse a risulta:
mentre la simmetrica rĺ di una retta r incidente a in un punto P Ŕ nchĺessa incidente r ancora in P e forma lo stesso angolo che r forma con a
In una simmetria assiale, presi due punti A,B situati su una retta perpendicolare allĺasse e sulla quale sia stato fissato un verso di percorrenza, se A precede B allora Bĺ precede Aĺ; per questo motivo si dice che una simmetria assiale con asse ôverticaleö scambia la destra con la sinistra. Notiamo infine che per individuare lĺasse di una simmetria assiale data Ŕ sufficiente conoscere una coppia di punti corrispondenti P e Pĺ distinti oppure due punti uniti distinti Q e R; nel primo caso lĺasse di simmetria Ŕ lĺasse del segmento PPĺ, nel secondo Ŕ la retta QR stessa. Simmetrie centrali. Fissato un punto O, si dice ôsimmetria centrale di centro Oö la corrispondenza che associa ad ogni punto P del piano diverso da O il punto Pĺ situato sulla retta OP, alla stessa distanza di P da O e nella semiretta opposta rispetto ad O (fig. 4). Se P concide con O allora Pĺ coincide con O. 
Nella simmetria centrale di centro O il punto Pĺ Ŕ detto ancora ôsimmetricoö di P rispetto ad O e la figura F' trasformata della figura F, Ŕ detta ancora ôsimmetricaö di F rispetto ad O. 
La figura 5 mostra due figure simmetriche nella simmetria di centro O. Come le simmetrie assiali anche le simmetrie centrali sono isometrie. Si ha poi che la simmetria centrale di centro O:
Contrariamente alle simmetrie assiali, le simmetrie centrali conservano il senso delle rotazioni nel piano, e per tale motivo le simmetrie centrali si dicono ôisometrie diretteö. Per individuare il centro di una simmetria centrale data Ŕ sufficiente conoscere una coppia di punti corrispondenti P e Pĺdistinti, poichÚ in tal caso il centro di simmetria Ŕ il punto medio del segmento PPĺ. Se invece P coincide con Pĺil centro di simmetria Ŕ P stesso. Rotazioni. Dati un angolo orientato a, cioŔ un angolo con verso fissato, e un punto O, si dice ôrotazione di centro O e angolo orientato aö la corrispondenza che associa ad ogni punto P del piano diverso da O il punto Pĺsituato sulla circonferenz a di centro O e raggio OP tale che PďPĺ = a. Se P coincide con O allora Pĺ coincide con O. 
Se lĺangolo a Ŕ lĺangolo nullo o lĺangolo giro, si ottiene lĺidentitÓ. 
La figura 8 mostra due figure F e F' dove F' Ŕ ottenuta da F mediante la rotazione di centro O e angolo orientato a . Anche le rotazioni sono isometrie ed inoltre, una rotazione di centro O:
Le rotazioni non sono involuzioni (fatta eccezione per le simmetrie centrali e lĺidentitÓ); sono tutte ôisometrie diretteö. Per individuare il centro e lĺangolo orientato di una rotazione data Ŕ sufficiente conoscere due coppie di punti corrispondenti P, Pĺ e Q,Qĺ : il centro O di rotazione Ŕ il punto di intersezione degli assi dei segmenti PPĺ e QQĺ se essi non sono paralleli, altrimenti Ŕ il punto di intersezione delle rette PQ e PĺQĺ; lĺampiezza dellĺangolo di rotazione Ŕ quella dellĺangolo PďPĺ (o QďQĺ) e il verso Ŕ quello che porta la semiretta OP a sovrapporsi alla semiretta OPĺ (o la semiretta OQ a sovrapporsi alla semiretta OQĺ). Traslazioni. Dato un segmento orientato AB, cioŔ un segmento con direzione e verso di percorrenza fissato (da A a B), si dice ôtraslazione del segmento orientato AB ö la corrispondenza che associa ad ogni punto P del piano il punto Pĺ tale che il segmento orientato PP' sia parallelo, di ugual lunghezza e verso concorde al segmento orientato AB 
Dalla definizione segue che ogni altro segmento orientato avente la stessa lunghezza e la stessa direzione di AB e verso concorde, individua la stessa traslazione. Se i due estremi A e B del segmento coincidono, la corrispondenza individuata Ŕ lĺidentitÓ. 
La figura 10 mostra due figure F e F' , dove F' Ŕ ottenuta da F mediante la traslazione di segmento orientato AB. Anche le traslazioni sono isometrie ed inoltre la traslazione di segmento orientato AB:
Una traslazione (che non sia lĺidentitÓ) non ha punti uniti, non Ŕ una involuzione ed Ŕ una isometria diretta. Per individuare il segmento orientato di una traslazione Ŕ sufficiente conoscere una coppia di punti corrispondenti P, Pĺ, infatti il segmento orientato PP' individua la traslazione. Antitraslazioni. Le ôantitraslazioniö sono le isometrie ottenute componendo una traslazione (diversa dallĺidentitÓ) con una simmetria assiale il cui asse sia parallelo al segmento orientato della traslazione (fig. 12). 
Notiamo che il risultato di tale composizione non dipende dallĺordine con cui le due trasformazioni vengono applicate. 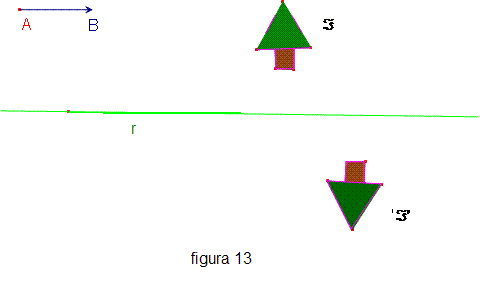
La figura 13 mostra due figure F e F' dove F' Ŕ ottenuta da F mediante unĺantitraslazione. Le proprietÓ di una antitraslazione sono ovviamente legate alle proprietÓ delle trasformazioni che la generano. Unĺantitraslazione Ŕ dunque unĺisometria la cui unica retta unita Ŕ lĺasse della simmetria assiale, non ha punti uniti, non Ŕ una involuzione ma Ŕ una isometria inversa. Per individuare lĺasse e il segmento orientato di una antitraslazione data Ŕ sufficiente conoscere due coppie di punti corrispondenti P, Pĺe Q,Qĺ:
|